Ukulungiselela ukusebenza nge-MPU-6050: Ukusetha, ukulinganisa kanye nezicelo
2024-04-25
9214
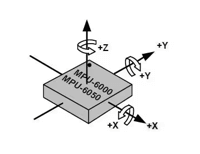
MPU-6050 Ingabe isigaba sokuqala sokuhlanganiswa kwe-6-axis axis ation processing, ehlanganisa i-gyroscope engu-3-axis, i-accelerometer ye-axis ye-3-axis kanye ne-processor edijithali edijithali (i-DMP).Inhloso yokuyisebenzisa ukuthola i-angle ethambisayo yento okufanele ilinganiswe (njenge-quadcopter, imoto elinganiselayo) ku-x, y, kanye, i-angle angle kanye ne-yaw angle.Sifunda idatha eyisithupha ye-MPU-6050 (inani le-axis-axis yokusheshisa isikhangiso se-angular velocity ad Value) nge-I2C interface.Ngemuva kokusebenza kwe-Movere Fusion, i-pitch, roll, kanye nama-angles akwaWaw angabalwa.Njengesethenjwa eqondile yamanani wokulinganisa, incazelo yenhlangano yokuhlaziya inzwa ukuqondiswa njengoba kukhonjisiwe kwisibalo esingezansi, okulandela umgomo wohlelo lokuxhumanisa olunesandla (okungukuthi, okukhomba okulungile kwesithupha ekuqondisweni okuhle kwe-x-I-Axis, amaphoyinti womunwe we-Index ekuqondisweni okuhle kwe-y-axis, futhi umunwe ophakathi okhombisa ukuqondiswa okuhle kwe-Z-axis. Inkomba).
Namabhuku
Ngebhasi layo lezinzwa elizinikezele le-I2C, i-MPU-6050 iyakwazi ukuthola okokufaka ngqo kusuka kwikhampasi yangaphandle ye-3-axis, enikeza okugcwele okuphelele kwe-9-axis MotionFunusion ™.Kuqeda inkinga yokungafani phakathi kwe-gyroscope ehlanganisiwe kanye nomugqa wesikhathi we-accelerator futhi kunciphisa kakhulu isikhala sokupakisha uma kuqhathaniswa nezixazululo eziningi.Uma uxhumeke kwi-magthetometer e-axis e-axis, i-MPU-60x0 iyakwazi ukuhlinzeka ngokuphuma okugcwele kwe-9-axis motion fusion ku-I2C noma i-SPI Port (Qaphela ukuthi i-Port Port itholakala kuphela ku-MPU-6000).
Ezinye izindlela nokulingana
- MPU-3300
- MPU-6000
- MPU-6500
Umkhiqizi we-MPU-6050
Umkhiqizi we-MPU-6050 yi-TDK.Ngemuva kwabasunguli bobabili be-TDK, uDkt Yogoro Kato noTheti Take, basungule uFerrite eTokyo, basungula iTokyo dekikagaku kogyo k.k.KeNgo-1935. Njengohlobo lomkhakha we-elektroniki we-elekthronikhi, i-TDK ibilokhu igcina isikhundla esivelele emikhakheni yezinto zokwenziwa nge-elekthronikhi kanye nezinto ze-elekthronikhi.Iphothifoliyo yomkhiqizo ephelele ka-TDK ne-Innovation eqhutshwa ihlanganisa izingxenye ezifana nama-capacitor we-ceramic, ama-capacitors we-aluminium electrolytic, ama-capacitors wefilimu, amadivayisi we-piezoelect, kanye nezinzwa nezinzwa,Izinzwa zikaMagnetic kanye ne-MEMS), njll. Ngaphezu kwalokho, i-TDK nayo ihlinzeka ngokuhlinzekwa kwamandla namadivayisi wamandla, amakhanda kazibuthe neminye imikhiqizo.Imikhiqizo yayo yomkhiqizo ifaka i-TDK, ama-EPCOs, ama-Inventense, ama-micronas, ama-tronics kanye ne-TDK-LAMBDA.
Umdwebo we-block yangaphakathi ye-MPU-6050
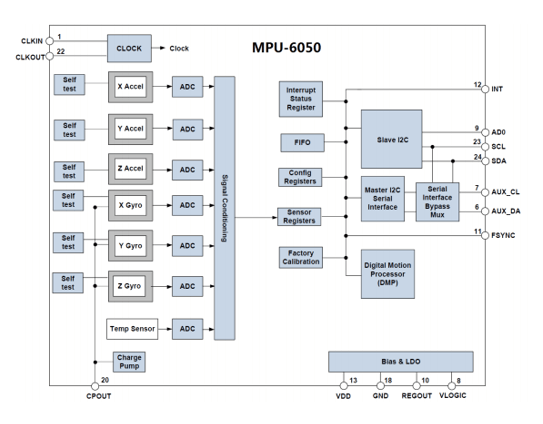
Phakathi kwazo, i-SCL ne-SDA yizindawo ze-IIC ezixhunywe kwi-MCU, futhi i-MCU ilawula i-MPU-6050 ngokusebenzisa lesi sibonisi se-IIC.Kukhona nesibonisi se-IIC, okungukuthi aux_cl ne-aux_da.Lokhu ku-interface kungasetshenziselwa ukuxhuma amadivaysi enceku yangaphandle, njengezinzwa ze-magnetic, ukwakha inzwa ye-Axis.I-Vlogic yi-IO Port Voltage.Le phini ingasekela ubuncane be-1.8V.Imvamisa siyixhuma ngqo vdd.I-AD0 iyisikhombisi sokulawula ikheli lesibonisi se-IIC (esixhunywe kwi-MCU).Le phini ilawula okuncane kwekheli le-IIC.Uma ixhunyiwe ku-GND, ikheli le-IIC le-MPU-6050 lingu-0x68;Uma ixhunyiwe ku-VDD, yi-0x69.Uyacelwa ukuthi uqaphele ukuthi ikheli lapha alifaki ukuhanjiswa okuncane kwedatha (okuncane kakhulu kusetshenziselwa ukumela imisebenzi yokufunda nokubhala).Kwi-MWBalcedSTC15, i-AD0 ixhunyiwe ku-GND, ngakho-ke ikheli le-IIC le-MPU-6050 liyi-0x68 (ngaphandle kwe-LIT ephansi).
Qala isikhombimsebenzisi se-IIC
I-MPU-6050 isebenzisa iic ukuxhumana ne-STC15, ngakho-ke sidinga ukuqala i-SDA ne-SCL yedatha exhunywe ku-MPU-6050 kuqala.
Setha kabusha i-MPU-6050
Lesi sinyathelo sibuyisela wonke amarejista ngaphakathi kwe-MPU-6050 kumanani awo azenzakalelayo, atholakala ngokubhala 1 ku-Bit7 yerejista yokulawulwa kwamandla 1 (0x6b).Ngemuva kokusetha kabusha, irejista yokulawulwa kwamandla 1 izobuyiselwa kunani elizenzakalelayo (0x40), futhi le irejista kufanele isethwe ku-0x00 ukuvusa i-MPU-6050 bese uyifaka esimweni esijwayelekile sokusebenza.
Setha ububanzi obugcwele be-angular velocity sensor (GYRO) ne-Senseror sensor
Kulesi sinyathelo, sibeka ibanga eliphelele (i-FSR) yezinzwa ezimbili ngokusebenzisa irejista yokucushwa kwe-gyroscope (0x1b) kanye nerejista yokumiswa kwenzwa yokusheshisa (0x1c) ngokulandelana.Imvamisa, sibeka uhla oluphelele lwe-gyroscope ku- ± 2000dps kanye nohla lwe-accelerometer ku-± 2G.
Setha amanye amapharamitha
Lapha, kudingeka futhi silungiselele amapharamitha alandelayo: Cisha ukuphazamiseka, khubaza isikhombimsebenzisi esibonakalayo se-AUX I2C, sisebenzise ama-FIFO esibonakalayo, bese ulungiselela isihlungi sesampula ye-gyroscope, bese ulungiselela isihlungi esiphansi sedijithali (i-DLPF).Njengoba singasebenzisi ukuphazamiseka ukufunda idatha kulesi sahluko, umsebenzi ophazamisayo udinga ukucishwa.Ngasikhathi sinye, ngoba asisebenzisi isikhombimsebenzisi se-AUX I2C ukuxhuma ezinye izinzwa zangaphandle, nathi sidinga ukuvala lokhu ku-interface.Le misebenzi ingalawulwa ngerejista evumela amandla okuphazamisa (0x38) kanye nerejista yokulawula yomsebenzisi (0x6a).I-MPU-6050 ingasebenzisa i-FIFO ukugcina idatha ye-sensor, kepha asikaze siyisebenzise kulesi sahluko, ngakho-ke zonke iziteshi ze-FIFO zidinga ukuvalwa.Lokhu kungalawulwa ngerejista ye-FIFO inika amandla (0x23).Ngokuzenzakalelayo, inani laleli rejista lingu-0 (okungukuthi, i-FIFO likhutshaziwe), ngakho-ke singasebenzisa inani elizenzakalelayo ngqo.Izinga lesampula le-gyroscope lilawulwa yirejista yesampula yeSampula (0x19).Imvamisa, sibeka lesi silinganiso sesampula siye ku-50Ngokuvamile, sizosetha i-DLPF ibe yingxenye ye-bandwidth yokulinganisa ukunemba kwedatha kanye nesivinini sokuphendula.
Lungiselela umthombo wewashi lesistimu futhi unike amandla inzwa ye-angular velocity kanye ne-acceleration sensor
Ukuhlelwa komthombo wewashi lesistimu kuncike kwirejista yokuphathwa kwamandla 1 (0x6b), lapho izingcezwana ezintathu eziphansi zale rejista zinquma ukukhethwa komthombo wewashi.Ngokuzenzakalelayo, lezi zingcezwana ezintathu zisethwe ku-0, okusho ukuthi uhlelo lusebenzisa i-OSCillator yangaphakathi ye-8mhz RC OSCillator njengomthombo wewashi.Kodwa-ke, ukuze kuthuthukiswe ukunemba kwewashi, sivame ukuwabeka ku-1 bese ukhetha i-X-axis gyroscope pll njengomthombo wewashi.Ngaphezu kwalokho, ukunika amandla inzwa ye-angular velocity kanye nokusheshisa inzwa futhi kuyisinyathelo esibalulekile kwinqubo yokuqalisa.Yomibili imisebenzi isetshenziswa nge-Power Management Rejista 2 (0x6c).Mane nje usethe i-bit ehambisanayo ku-0 ukuze usebenzise inzwa ehambisanayo.Ngemuva kokuqeda lezi zinyathelo ezingenhla, i-MPU-6050 ingafaka isimo esijwayelekile sokusebenza.Lawo marejista angabekwe ngokukhethekile azokwamukela amanani azenzakalelayo asethiwe esethiwe ngohlelo.
Ngabe umsebenzi we-MPU-6050 wenza kanjani?
Inzwa ye-gyro
I-sensor ifakwe i-gyro ngaphakathi, ezohlala ihambisana nendlela yokuqala ngenxa yomphumela we-gyroscopic.Ngakho-ke, singakwazi ukubala ukuqondiswa kanye ne-angle yokujikeleza ngokuthola ukuphambuka kwe-gyro kusuka endaweni yokuqala.
Inzwa ye-accelerometer
Inzwa ye-accelerometer yithuluzi elingalinganisa ukushesha futhi lisebenza ngokususelwa kumgomo wePiezoelectric.Ngesikhathi sokusheshisa, inzwa ilinganisa amandla angephakathi asetshenziswa kwi-mass block bese ibala inani lokusheshisa kusetshenziswa umthetho wesibili kaNewton.
I-Digital Motion processor (DMP)
I-DMP iyimodyuli yokucubungula idatha ku-MPU6050 Chip ene-algorithm eyakhelwe ngaphakathi ye-kalman yokuhlunga ukuze uthole idatha evela e-gyroscope nezinzwa ze-accelerometer futhi icubungule imibuzo ekhishwayo.Lesi sici sinciphisa kakhulu umthwalo womsebenzi we-microprocessorsorsorsorsorsorsorsorsorsorsorsordal futhi uvikele ukuhlunga okuyisidina kanye nenqubo yokufakwa kwedatha.
Amanothi:
Ama-Quaternions: Quaternions alula izinombolo ze-supermortoplex.Izinombolo eziyinkimbinkimbi zihlanganiswa nezinombolo zangempela kanye neyunithi yokucabanga i, lapho ngi ^ 2 = -1.
Isetshenziswa kuphi i-MPU-6050?
- Amathoyizi
- Imidlalo ye-handset nephakethe ephathekayo
- Abalawuli bomdlalo osuselwa ku-Motion
- Ubuchwepheshe beBlurfree ™ (yevidiyo / namanje ukuzinza kwesithombe)
- Ubuchwepheshe be-Airsign ™ (ngokuphepha / ubuqiniso)
- Ukuqashelwa kokuthinta okusheshayo
- Izinzwa ezigqokayo zempilo, ukuqina kanye nemidlalo
- Umdlalo onikwe amandla motion kanye nohlaka lohlelo lokusebenza
- Ubuchwepheshe beMotioncoMMAND ™ Technology (of Shorts Shorts)
- Izinsizakalo ezenzelwe indawo, amaphuzu ezithakazelo, kanye nokuthola kabusha okufile
- Izilawuli ezikude ze-3D zama-DTV axhunyiwe kwi-inthanethi bese usetha amabhokisi aphezulu, amagundane we-3D
- Ubuchwepheshe be-ToundanyAny.
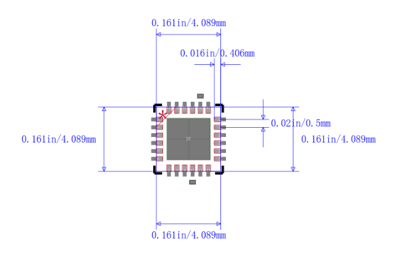
Iphakheji ye-MPU-6050
Unganciphisa kanjani umsindo we-MPU-6050?
Singathatha izindlela ezilandelayo zokunciphisa umsindo we-MPU-6050.
Sebenzisa izinzwa ezilinganisiwe
Ukulinganisa i-accelerometer ne-gyroscope ye-MPU-6050 kungasusa i-bias nephutha lezinzwa ngokwazo, ngaleyo ndlela kunciphise umphumela womsindo.Inqubo yokulinganisa imvamisa iqukethe izigaba ezimbili: ukulinganiswa kwe-tuli kanye nokulinganisa ukunyakaza.
Inqubo yokuhlunga ye-Hardware
Ukungeza ama-capacitor wokuhlunga kumugqa wamandla we-MPU-6050 kunganciphisa umthelela wokunikeza amandla umsindo ku-sensor.Ngaleso sikhathi, ngesikhathi se-PCB Lameut, kufanele sizame ukugcina i-MPU-6050 kude nemithombo engaba khona yokuphazamiseka, efana nemigqa yesiginali ephezulu kakhulu nezinto eziphakeme.
Ukucutshungulwa kwesoftware yokuhlunga
Ngemuva kokuqoqa idatha eluhlaza kusuka ku-MPU-6050, singangeza isixhumanisi sokuhlunga se-software ukuze sicubungule idatha kuqala ukuze sisuse amandla okuqedwa komsindo.Izindlela zokuhlunga zesoftware ezisetshenziswa kaningi zifaka ukuhlunga okushoyo, ukuhlunga okuphakathi, ukuhlunga kukaKalman nokunye.
Sebenzisa isihlungi sangaphakathi sokudlula okuphansi
I-MPU-6050 inesihlungi sangaphakathi esihlanganisiwe sokudlulisa sedijithali, esingasetshenziswa ukunciphisa umsindo omkhulu wemvamisa ngokubeka imvamisa yalo ye-cutoff.Ngokukhethekile, singasetha imvamisa ye-cutoff yesihlungi sedijithali ngokushintsha irejista ye-Confining ye-MPU-6050 ukuqeda umsindo ovame ukwenziwa yi-A / D.
Ukubalwa kweTrajectory okususelwa ku-6050
I-MPU-6050 iyinhlangano ye-accelerometer ye-axis eyisithupha ne-gyroscope engasetshenziswa ukukala ukunyakaza nesimo sengqondo sezinto.Ukubalwa kwe-Motion Trajectory okususelwa ku-MPU-6050 kungabonakala ngezinyathelo ezilandelayo:
Isinyathelo sokuqala ukufunda idatha yezinzwa.Sidinga ukufunda idatha ye-accelerometer ne-gyroscope kusuka ezinzwa ze-MPU-6050 zisebenzisa abashayeli abafanele kanye nemisebenzi yelabhulali.Le mininingwane imvamisa ikhishwa ngefomethi yedijithali, ngakho-ke okunye ukuguqulwa kanye nomsebenzi wokulinganisa kuyadingeka ukuze ubaguqukele kuzilinganiso zangempela kumayunithi angokomzimba.
Isinyathelo sesibili ukubala ukusheshisa.Okokuqala, kudingeka sicubungule imininingwane kusuka ku-accelerometer ukuthola ukusheshiswa kwento ekwisitho ngasinye.Kamuva, ukuze babale i-velocity kanye nokukhishwa kwento esekelweni ngalunye, sidinga ukuhlanganisa idatha yokusheshisa.Amasu wokuhlanganisa amanani, njengendlela ye-euler noma indlela yeLung-Kutta, ajwayele ukusetshenziswa kule nqubo ukuqinisekisa ukunemba kwezibalo zokubalwa.
Isinyathelo sesithathu ukubala isivinini se-angular.Usebenzisa idatha ye-gyroscope, ukuvezwa kwe-angular kwento ese-axis ngayinye kungabalwa.Futhi, le datha idinga ukulinganiswa futhi iguqulwe ukuthi ithole i-velocity ye-angular kumayunithi wangempela womzimba.
Isinyathelo sesine ukubala ukujikeleza.Ngokuhlanganisa idatha ye-angular velocity, i-angle yokujikeleza kwento e-eksisi ngayinye ingabalwa.Lokhu kungenziwa ngokusebenzisa amasu wokuhlanganisa amanani afana nendlela ye-euler noma indlela ye-longe-kutta ukubala i-angle.
Isinyathelo sesihlanu ukuhlanganisa imininingwane.Sihlanganisa idatha kusuka kuma-accelerometer kanye ne-gyroscopes ukuthola isimo esiphelele semininingwane ephelele yento.Lokhu kungenziwa kusetshenziswa ama-algorithms anjenge-syolver yesimo se-queternion noma i-euler angle solver.
Isinyathelo sesithupha ukubona ngeso lengqondo imiphumela.Siguqula i-trajectory ehlanganisiwe ye-ONLY I-ATROJORY ibe iqoqo lamaphoyinti ohlelweni lokuxhumanisa lwe-3D futhi silibonise ukusebenzisa amathuluzi afanele okubona ngokuqonda okunembile kwe-trajectory yento ebonakalayo nesimo sengqondo.
Imibuzo Ebuzwa Njalo [I-FAQ]
1. Linembile kangakanani i-MPU6050?
Imiphumela etholakele ikhombisa ukunemba okwenele okungaphansi kwe-1% kanye nokwethembeka, okuqinisekisa ubukhulu bokuphakanyiswa komgwaqo ophakanyisiwe kanye namazinga aphezulu embonini ye-lift.
2. Ungayifunda kanjani idatha kusuka ku-MPU6050?
Ukuze ufunde amarejista we-MPU6050 wangaphakathi, i-Master ithumela isimo sokuqala, elandelwa yikheli le-I2C le-Slave kanye nokubhala, bese kuthi ikheli lokubhalisa elizofundwa.
3. Isetshenziswa kuphi i-MPU6050?
Emavishini agqokekayo okulandela umkhondo wezempilo, wokulandela ngomkhondo.Kwe-Drones and Quadcopters, i-MPU6050 isetshenziselwa ukulawulwa kwesikhundla.Isetshenziswa ukulawula ingalo yamarobhothi.Amadivayisi wokulawula ukuthinta ngesandla.
4. Ngabe i-MPU6050 i-IMU?
Ibhulokhi ye-MPU6050 IMUSOR ye-MPU60 ifunda idatha kusuka ku-MPU-6050 sensor exhunywe kwihardware.Ukusheshisa okuphumayo kwe-block, izinga eli-angular, kanye nokushisa kanye nama-axes enzwa.
5. Kuyini ukucutshungulwa kwe-MPU6050?
Le yiprosesa ye-OnPu6050's onboard ehlanganisa idatha eqhamuka kwi-accelerometer ne-gyroscope.I-DMP iyisihluthulelo sokusebenzisa i-MPU6050 futhi ichazwa ngokuningiliziwe ngokuzayo.Njengawo wonke ama-microprocessors I-DMP idinga i-firmware ukuze isebenze.
Ukuhlolwa komsebenzi.Imikhiqizo ephakeme kakhulu esebenza kabi futhi insizakalo engcono kakhulu ukuzibophezela kwethu kwaphakade.
Isihloko esishisayo
- Yi-CR2032 ne-CR2016 eguqukayo
- UMosfet: Ukuchazwa, Umgomo Wokusebenza Nokukhethwa
- Phinda ufake ukufakwa nokuhlola, ukutolika kokudluliselwa kwemidwebo ye-wiring
- CR2016 vs. CR2032 Uyini umehluko
- NPN vs. PNP: Uyini umehluko?
- ESP32 vs STM32: Yikuphi I-Microcontroller Kungcono Wena?
- I-LM358 I-Dual Operational Amplifier ephelele Umhlahlandlela: Ama-Pilouts, ama-PrailIuit Diagraphs, okufanayo, izibonelo eziwusizo
- CR2032 vs DL2032 VS CR2025 Umhlahlandlela wokuqhathanisa
- Ukuqonda umehluko e-ESP32 kanye ne-ESP32-S3 Technical and Performance Anaction
- Ukuhlaziywa okuningiliziwe kwe-RC Series Circuit
 Ukuhlola amakhono nokusetshenziswa kwe-NRF24L01 Chip Chip
Ukuhlola amakhono nokusetshenziswa kwe-NRF24L01 Chip Chip
2024-04-25
 I-MMBBT3904 NPN Transistor: Ukucaciswa kwayo, umhlahlandlela wokusebenza okuphelele, kanye ne-MMBT3904 vs. MMMBT5551
I-MMBBT3904 NPN Transistor: Ukucaciswa kwayo, umhlahlandlela wokusebenza okuphelele, kanye ne-MMBT3904 vs. MMMBT5551
2024-04-25
Inombolo eshisayo eshisayo
 C2012C0G1H222K060AA
C2012C0G1H222K060AA C1005JB1C333K050BA
C1005JB1C333K050BA- C2012C0G2E102J085AA
 12061A472JAT2A
12061A472JAT2A CGJ6M2X7R2A474K200AA
CGJ6M2X7R2A474K200AA CL10B104KA85PNC
CL10B104KA85PNC C5750X7S3D472M200KA
C5750X7S3D472M200KA 12063A562GAT4A
12063A562GAT4A T496D107K010BH61107505
T496D107K010BH61107505 MAX3880ECB+D
MAX3880ECB+D
- MKL43Z256VLH4
- AT45DB011D-SSH-B
- SC1485ITSTRT
- RT0603BRE075K49L
- S9S08DN32F2VLC
- RL2512JK-070R06L
- 1MBI200SA-120B-52
- PM52AVAZ060
- PTN04050CAD
- TRSF3223EIPW
- T491A335K016AT2478
- SN74LS645N
- ADG506ABQ
- AD7892SQ-1
- T491D686M006AT2478
- LM5045SQX/NOPB
- ADC128S052CIMT
- AD825ARZ-REEL
- T491A105M016ZTAU00
- AD9554BCPZ
- MT48LC8M32B2TG-7
- 2SA1943-O/2SC5200-O
- EC15202C
- LT1959CS8
- MB86H610HPB-6F1T-GE1
- P80C52BEFA
- PT6553LQ
- SC16C750BIB64
- STI5517AWA-X
- STV0984S
- TDA10086HT
- WL1271BYFVR
- WPCE771CA0DG
- LXT971LC
- RTL8111DL-VB-GR
- TSC3060IRTWR
- UDN3614M
- LTC2970IUFD-1#TRPBF.
- P7SA-10F-ND DC24